G. Yan, G. Tsekenis, B. Barzel, J.-J. Slotine, Y.-Y. Liu, A.-L. Barabási
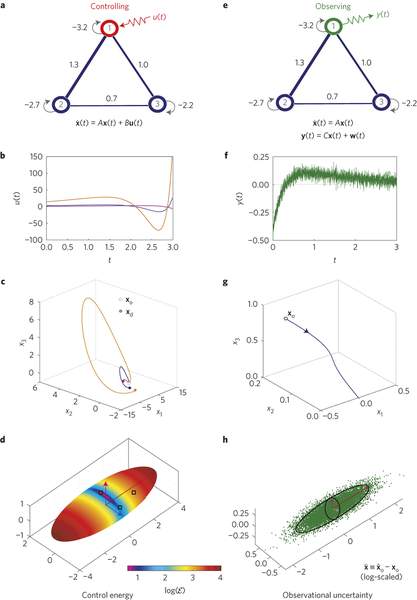
Spectrum of controlling and observing complex networks
Nature Physics 11, 779-796 (2015)
Read the abstract
Recent studies have made important advances in identifying sensor or driver nodes, through which we can observe or control a complex system. But the observational uncertainty induced by measurement noise and the energy required for control continue to be significant challenges in practical applications. Here we show that the variability of control energy and observational uncertainty for different directions of the state space depend strongly on the number of driver nodes. In particular, we find that if all nodes are directly driven, control is energetically feasible, as the maximum energy increases sub-linearly with the system size. If, however, we aim to control a system through a single node, control in some directions is energetically prohibitive, increasing exponentially with the system size. For the cases in between, the maximum energy decays exponentially when the number of driver nodes increases. We validate our findings in several model and real networks, arriving at a series of fundamental laws to describe the control energy that together deepen our understanding of complex systems.

Jianxi Gao, Y.-Y.Liu, R. M. D'Souza, A.-L. Barabási
Target control of complex networks
Nature Communications 5:5415, 1-7 (2014)
Read the abstract
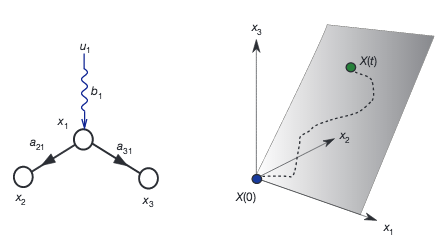
Controlling large natural and technological networks is an outstanding challenge. It is typically neither feasible nor necessary to control the entire network, prompting us to explore target control: the efficient control of a preselected subset of nodes. We show that the structural controllability approach used for full control overestimates the minimum number of driver nodes needed for target control. Here we develop an alternate ‘k-walk’ theory for directed tree networks, and we rigorously prove that one node can control a set of target nodes if the path length to each target node is unique. For more general cases, we develop a greedy algorithm to approximate the minimum set of driver nodes sufficient for target control. We find that degree heterogeneous networks are target controllable with higher efficiency than homogeneous networks and that the structure of many real-world networks are suitable for efficient target control.
T. Jia, A.-L. Barabási
Control capacity and a random sampling method in exploring controllability of complex networks
Scientific Reports 3:2354, 1-6 (2013)
Read the abstract
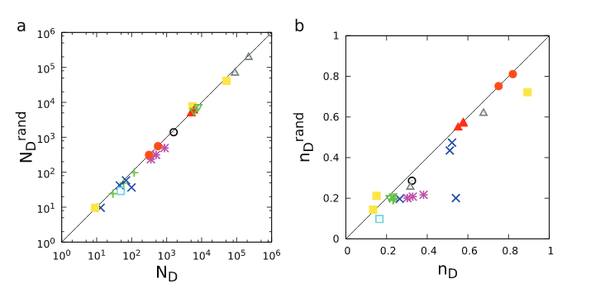
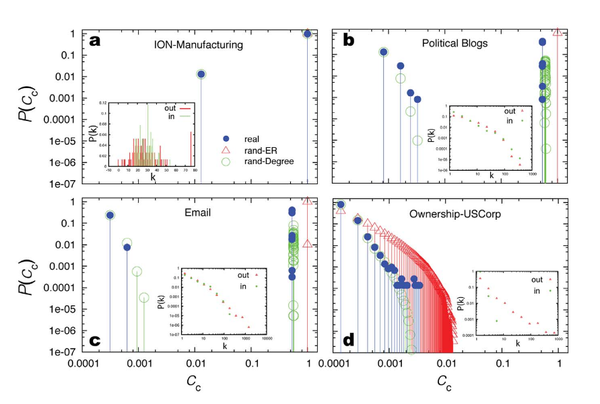
Controlling complex systems is a fundamental challenge of network science. Recent advances indicate that control over the system can be achieved through a minimum driver node set (MDS). The existence of multiple MDS's suggests that nodes do not participate in control equally, prompting us to quantify their participations. Here we introduce control capacity quantifying the likelihood that a node is a driver node. To efficiently measure this quantity, we develop a random sampling algorithm. This algorithm not only provides a statistical estimate of the control capacity, but also bridges the gap between multiple microscopic control configurations and macroscopic properties of the network under control. We demonstrate that the possibility of being a driver node decreases with a node's in-degree and is independent of its out-degree. Given the inherent multiplicity of MDS's, our findings offer tools to explore control in various complex systems.
T. Jia, Y.-Y. Liu, E. Csóka, M. Pósfai, J.-J. Slotine, A.-L. Barabási
Emergence of bimodality in controlling complex networks
Nature Communications 4:2002, 1-6 (2013)
Read the abstract
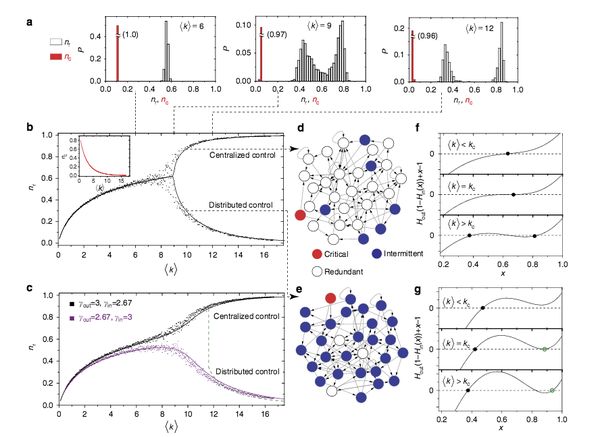
Our ability to control complex systems is a fundamental challenge of contemporary science. Recently introduced tools to identify the driver nodes, nodes through which we can achieve full control, predict the existence of multiple control configurations, prompting us to classify each node in a network based on their role in control. Accordingly a node is critical, intermittent or redundant if it acts as a driver node in all, some or none of the control configurations. Here we develop an analytical framework to identify the category of each node, leading to the discovery of two distinct control modes in complex systems: centralized versus distributed control. We predict the control mode for an arbitrary network and show that one can alter it through small structural perturbations. The uncovered bimodality has implications from network security to organizational research and offers new insights into the dynamics and control of complex systems.
Y.-Y. Liu, J.-J. Slotine, A.-L. Barabási
Observability of complex systems
Proceedings of the National Academy of Sciences 110, 1-6 (2013)
Read the abstract
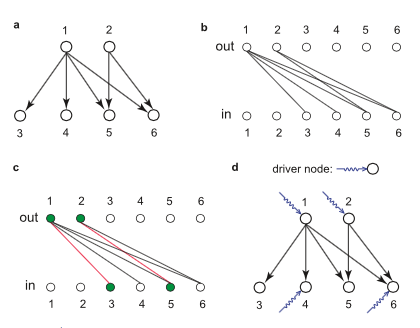
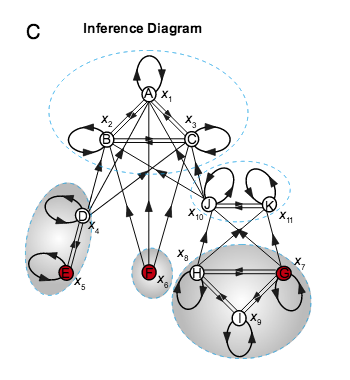
A quantitative description of a complex system is inherently limited by our ability to estimate the system’s internal state from experimentally accessible outputs. Although the simultaneous measurement of all internal variables, like all metabolite concentrations in a cell, offers a complete description of a system’s state, in practice experimental access is limited to only a subset of variables, or sensors. A system is called observable if we can reconstruct the system’s complete internal state from its outputs. Here, we adopt a graphical approach derived from the dynamical laws that govern a system to determine the sensors that are necessary to reconstruct the full internal state of a complex system. We apply this approach to biochemical reaction systems, finding that the identified sensors are not only necessary but also sufficient for observability. The developed approach can also identify the optimal sensors for target or partial observability, helping us reconstruct selected state variables from appropriately chosen outputs, a prerequisite for optimal biomarker design. Given the fundamental role observability plays in complex systems, these results offer avenues to systematically explore the dynamics of a wide range of natural, technological and socioeconomic systems.
M. Pósfai, Y.-Y. Liu, J.-J. Slotine, A.-L. Barabási
Effect of correlations on network controllability
Scientific Reports 3:1067, 1-7 (2013)
Read the abstract
A dynamical system is controllable if by imposing appropriate external signals on a subset of its nodes, it can be driven from any initial state to any desired state in finite time. Here we study the impact of various network characteristics on the minimal number of driver nodes required to control a network. We find that clustering and modularity have no discernible impact, but the symmetries of the underlying matching problem can produce linear, quadratic or no dependence on degree correlation coefficients, depending on the nature of the underlying correlations. The results are supported by numerical simulations and help narrow the observed gap between the predicted and the observed number of driver nodes in real networks.
Y.-Y. Liu, J.-J. Slotine, A.-L. Barabasi
Control centrality and hierarchical structure in complex networks
PLoS One 7, e44459 (2012
Read the abstract
We introduce the concept of control centrality to quantify the ability of a single node to control a directed weighted network. We calculate the distribution of control centrality for several real networks and find that it is mainly determined by the network’s degree distribution. We show that in a directed network without loops the control centrality of a node is uniquely determined by its layer index or topological position in the underlying hierarchical structure of the network. Inspired by the deep relation between control centrality and hierarchical structure in a general directed network, we design an efficient attack strategy against the controllability of malicious networks.
Y.-Y. Liu, J.-J. Slotine, A.-L. Barabási
Few inputs can reprogram biological networks (reply by Liu et al.)
Nature 473, 167-173 (2011)
Read the abstract
Reply to Franz-Josef Muller and Andreas Schuppert (Nature 478, Pg. E4, Oct. 2011)
Y.-Y. Liu, J.-J. Slotine, A.-L. Barabási
Controllability of complex networks
Nature 473, 167-173 (2011)
Read the abstract
The ultimate proof of our understanding of natural or technological systems is reflected in our ability to control them. Although control theory offers mathematical tools for steering engineered and natural systems towards a desired state, a framework to control complex self-organized systems is lacking. Here we develop analytical tools to study the controllability of an arbitrary complex directed network, identifying the set of driver nodes with time-dependent control that can guide the system’s entire dynamics. We apply these tools to several real networks, finding that the number of driver nodes is determined mainly by the network’s degree distribution. We show that sparse inhomogeneous networks, which emerge in many real complex systems, are the most difficult to control, but that dense and homogeneous networks can be controlled using a few driver nodes. Counterintuitively, we find that in both model and real systems the driver nodes tend to avoid the high-degree nodes.